https://www.hankyung.com/it/article/2019050843591?utm_source=daum&utm_medium=daum_related&utm_campaign=related_daum_all
'15세 휴보' 일본·독일 부품 없인 한발짝도 못 걷는다
입력2019.05.08 17:48 수정2019.05.09 07:19 지면A1
스트롱코리아 포럼 2019
갈 길 먼 K로봇 - 로봇 기술 대해부
로봇산업 급성장 속 한국은 '제자리걸음'
머리·관절·근육 등 여전히 외국기술에 의존
말로만 국가전략산업…원천기술 거의 없어
로봇산업 급성장 속 한국은 '제자리걸음'
머리·관절·근육 등 여전히 외국기술에 의존
말로만 국가전략산업…원천기술 거의 없어

국내 최고 과학기술대학 KAIST가 2004년 선보인 휴머노이드 로봇 ‘휴보’(사진).
사람처럼 팔다리를 사용하고 지능을 가진 로봇을 자력 개발할 수 있다는 기대에 대한민국이 한껏 들떴다.
2015년 휴보는 세계 재난구조로봇 경연대회에서 1위를 차지하며 명성을 떨치기도 했다.
올해 만 15세인 휴보는 어느 수준으로 진화했을까.
올해 만 15세인 휴보는 어느 수준으로 진화했을까.
‘휴보 창시자’로 불리는 오준호 KAIST 기계공학과 교수의 고백에 불편한 진실이 녹아 있었다.
그는 8일 “(핵심 부품을) 외국에서 사다 끼우니 ‘일류’가 안 된다”며
“마음을 비우고 원천기술 개발로 돌아갔다”고 털어놨다.
한국경제신문이 확인한 결과 휴보의 머리(제어기), 관절과 근육(액추에이터) 등 핵심 부분은
한국경제신문이 확인한 결과 휴보의 머리(제어기), 관절과 근육(액추에이터) 등 핵심 부분은
모두 일본 스위스 독일 등 외국 기술에 의존하고 있었다.
로봇산업이 지향하는 최종 목적지다.
주요국이 개발 각축전을 벌이는 이유다.
휴머노이드는 의료, 국방, 재난구호, 작업보조 같은 서비스 분야에 투입될 전망이다.
휴머노이드 등이 활약할 서비스 로봇 시장은 급성장세다.
휴머노이드 등이 활약할 서비스 로봇 시장은 급성장세다.
리서치업체 트랙티카는 세계 서비스 로봇 시장 규모가 2017년 이후 연평균 28% 성장해
2025년 1593억달러(약 186조3000억원)에 이를 것으로 예상했다.
한국은 원천기술과 전략 부재로 글로벌 경쟁에서 뒤처지고 있다.
한국은 원천기술과 전략 부재로 글로벌 경쟁에서 뒤처지고 있다.
명함을 내밀 수 있는 기업이 한두 곳뿐이다.
정부의 로봇 연구개발(R&D)은 과학기술정보통신부 산업통상자원부 등 부처별로 제각각 진행되고 있다.
로봇업계 관계자는 “정부가 로봇산업을 국가전략산업으로 지정한 지 13년이 흘렀지만
확보된 원천기술은 거의 없다”고 말했다.
휴보 뜯어보니…핵심부품에 '메이드 인 코리아'는 없었다
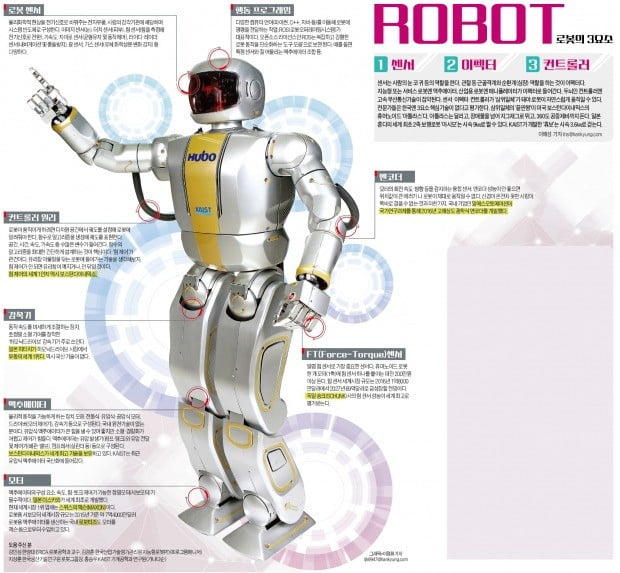
그래픽 오른쪽 아래 돋보기를 클릭하면 뚜렷하게 볼 수 있습니다
로봇의 3요소는 ①센서 ②이펙터 ③컨트롤러다.
센서는 사람의 눈 코 귀 등의 역할을 한다.
관절 등 근골격계와 순환계(심장) 역할을 하는 것이 이펙터다.
지능형 또는 서비스 로봇엔 액추에이터, 산업용 로봇엔 매니퓰레이터가 이펙터로 들어간다.
두뇌인 컨트롤러엔 고속 무선통신기술이 집약된다.
센서·이펙터·컨트롤러가 ‘삼위일체’가 돼야 로봇이 자연스럽게 움직일 수 있다.
전문가들은 한국엔 3요소 핵심기술이 없다고 평가한다.
전문가들은 한국엔 3요소 핵심기술이 없다고 평가한다.
삼위일체의 ‘끝판왕’이 미국 보스턴다이내믹스의 휴머노이드 ‘아틀라스’다
. 아틀라스는 달리고, 장애물을 넘어 지그재그로 뛰고, 360도 공중제비까지 돈다.
일본 혼다의 세계 최초 2족 보행로봇 ‘아시모’는 시속 9㎞로 뛸 수 있다.
KAIST가 개발한 ‘휴보’는 시속 3.6㎞로 걷는다.
로봇 센서 :
로봇 센서 :
물리화학적 현상을 전기신호로 바꿔주는 전자부품. 사람의 감각기관에 해당하며 시스템 반도체로 구성한다.
이미지 센서(눈), 터치 센서(피부),
힘 센서(힘을 측정해 전기신호로 전환),
가속도·자이로 센서(균형유지 및 동작제어),
라이다·레이더 센서(내비게이션 및 충돌방지),
광 센서, 가스 센서(유체 화학성분 변화 감지) 등 다양하다.
FT(Force-Torque) 센서 :
FT(Force-Torque) 센서 :
일명 힘 센서로 가장 중요한 센서다.
휴머노이드 로봇 한 개 모터(1축)에 힘 센서 하나를 붙이는 데만 200만원 이상 든다.
힘 센서 세계시장 규모는 2016년 1억8000만달러에서 2027년 69억달러로 급성장할 전망이다.
독일 슝크(SCHUNK)사의 힘 센서 성능이 세계 최고로 평가받는다.
엔코더 :
엔코더 :
모터의 회전속도·방향 등을 감지하는 융합 센서.
엔코더 성능이 안 좋으면 위치값이 큰 에러가 나 로봇이 제대로 움직일 수 없다.
신경이 온전치 못한 사람이 똑바로 걸을 수 없는 것과 마찬가지.
국내 기업인 알에스오토메이션이 국가연구과제를 통해 2016년 고해상도 광학식 엔코더를 개발했다.
액추에이터 :
액추에이터 :
물리적 동작을 가능하게 하는 장치 모음.
전동식·유압식·공압식 모터, 드라이버(모터 제어기), 감속기 등으로 구성된다.
국내 원천기술이 없는 분야다.
유압식 액추에이터가 큰 힘을 낼 수 있어 좋지만 소형·경량화가 어렵고 제어가 힘들다.
액추에이터는 유압 발생기(펌프·탱크)와
유압 전달 및 제어기(배관·밸브), 컴프레서(실린더 등) 등으로 구성된다.
보스턴다이내믹스가 세계 최고 기술을 보유하고 있다.
KAIST는 최근 유압식 액추에이터 국산화에 들어갔다.
모터 :
모터 :
액추에이터의 구성 요소. 속도, 힘·토크 제어가 가능한 정밀모터(서보모터)가 필수적이다.
세계시장 1위 업체는 스위스의 맥슨(MAXON)이다.
로봇용 서보모터 세계시장 규모는 2015년 기준 약 7억4000만달러
. 로봇용 액추에이터를 생산하는 국내 로보티즈도
모터를 맥슨, 일본 마부치(MABUCHI) 등으로부터 수입하고 있다.
감속기 :
감속기 :
동작 속도를 미세하게 조절하는 장치. 초정밀 소형 기어를 장착한 ‘하모닉드라이브’ 감속기가 주로 쓰인다.
일본 히타치가 하모닉드라이브 시장에서 부동의 세계 1위다.
역시 국산 기술이 없다.
컨트롤러 원리 :
컨트롤러 원리 :
로봇이 움직이려면 다차원 공간에서 궤도를 설정해 로봇에게 알려줘야 한다.
함수로 알고리즘을 생성해 궤도를 표현한다.
공간, 시간, 속도, 가속도 등 수많은 변수가 들어간다.
함수의 알고리즘을 최대한 간단하게 설계하는 것이 핵심이다.
‘힘 제어’가 관건이다.
유리창 이물질을 닦는 로봇에 들어가는 기술을 생각해보자.
힘 제어가 안 되면 유리창이 깨지거나, 안 닦일 것이다.
힘 제어의 세계 1인자 역시 보스턴다이내믹스.
행동 프로그래밍 :
행동 프로그래밍 :
다양한 컴퓨터 언어(파이썬, C++, 자바 등)를 이용해 로봇에 명령을 전달하는 작업
. ROS(로봇오퍼레이팅시스템)가 대표적이다.
오픈소스 라이선스인 ROS는 복잡하고 강렬한 로봇 동작을 단순화하는 ‘도구 모음’으로 보면 된다.
예를 들면 특정 센서와 잘 어울리는 액추에이터 조합 등.
도움말 주신 분 :
도움말 주신 분 :
강민성 한양대 ERICA 로봇공학과 교수,
김경훈 한국산업기술평가관리원 지능형로봇PD(프로그램매니저),
지상훈 한국생산기술연구원 로봇그룹장,
홍승우 KAIST 기계공학과 연구원<가나다순>
한국 휴머노이드 로봇의 창시자 오준호 KAIST 교수
"센서 등 로봇 핵심기술 국산화 못하면 '영원한 2류'로 남는다"
“(미국의 보스턴다이내믹스와 일본의 혼다를) 금방 따라잡을 수 있을 것 같았는데…. 갑갑합니다.”
한국 휴머노이드 로봇의 창시자 오준호 KAIST 교수(사진)는 8일 이렇게 탄식했다.
"센서 등 로봇 핵심기술 국산화 못하면 '영원한 2류'로 남는다"
“(미국의 보스턴다이내믹스와 일본의 혼다를) 금방 따라잡을 수 있을 것 같았는데…. 갑갑합니다.”
한국 휴머노이드 로봇의 창시자 오준호 KAIST 교수(사진)는 8일 이렇게 탄식했다.
2004년 걷는 ‘휴보1’, 2009년 뛰는 ‘휴보2’를 내놓으며 국내외 시선을 사로잡은 오 교수.
그는 2015년 미국 방위고등연구계획국(DARPA)이 주최한 재난구조 로봇경연대회에서 ‘DRC 휴보+’로 우승하며
커리어에 정점을 찍었다.
탑승형 2족 보행로봇 ‘FX-2’와 함께 2018 평창동계올림픽 성화봉송주자로 나서 다시 주목받았다.
오 교수가 전한 실상은 겉보기와 많이 달랐다.
오 교수가 전한 실상은 겉보기와 많이 달랐다.
그는 “모터 등으로 구성된 액추에이터 같은 핵심기술을 국산화하지 않으면
보스턴다이내믹스 수준의 로봇을 만들 수 없다는 결론을 내렸다”고 말했다.
보스턴다이내믹스의 휴머노이드 로봇 ‘아틀라스’는
보스턴다이내믹스의 휴머노이드 로봇 ‘아틀라스’는
전쟁터의 병사처럼 경사진 곳을 마구 뛰어다니고,
360도 공중제비도 가능하다.
보스턴다이내믹스는 구글이 인수했다가 2017년 일본 소프트뱅크에 되팔았다.
보스턴다이내믹스와 2000년 세계 최초로 2족 보행로봇 ‘아시모’를 내놓은 혼다는
핵심기술을 외부에 철저히 감추는 전략을 고수하고 있다.
오 교수는 “앞단(핵심부품)에서 외국 제품에 의존하다 보니 고기능 설계가 불가능했다”고 털어놨다.
오 교수는 “앞단(핵심부품)에서 외국 제품에 의존하다 보니 고기능 설계가 불가능했다”고 털어놨다.
그는 유압장치, 감속기 등 핵심기술 전반의 국산화 연구를 하고 있다.
한국전기연구원, 서울과학기술대, 국민대와 함께 진행 중인
‘고속·고출력 로봇 핵심부품 및 지능 원천기술 개발’ 과제다.
‘휴머노이드 로봇 원천기술 및 표준 플랫폼 개발’은 단독으로 수행하고 있다.
둘 다 산업통상자원부가 지원하는 사업이다.
2023년께 아틀라스와 비슷한 성능의 ‘휴보3’(가칭)를 선보이는 것이 그의 목표다.
아틀라스와 아시모 말고도 인간 외형에 뛰어난 기능을 지닌 로봇은 수없이 많다.
아틀라스와 아시모 말고도 인간 외형에 뛰어난 기능을 지닌 로봇은 수없이 많다.
이탈리아 IIT사의 워크맨, 일본 AIST사의 HRP, 구글의 섀프트,
독일 항공우주연구소(DLR)의 토로, 스페인 PAL로보틱스의 림(REEM)-C 등이다.
각국에서 쏟아져나오는 휴머노이드와 차별화하려면
기초기술로 돌아갈 수밖에 없었다는 게 오 교수의 설명이다.
그는 국내 로봇기술이 양과 질 모든 면에서 선진국에 비해 ‘상당히’ 떨어진다고 진단했다.
그는 국내 로봇기술이 양과 질 모든 면에서 선진국에 비해 ‘상당히’ 떨어진다고 진단했다.
“98% 수준에 도달하는 건 누구나 할 수 있지만 2%가 부족하면 ‘영원한 2류’로 남는다”며
“오직 원천기술을 보유하고 있을 때만 2%를 달성할 수 있다”고 강조했다.
오 교수는 올해 정년퇴직한다.
오 교수는 올해 정년퇴직한다.
휴보 연구개발실인 휴보랩을 이끌 후임 교수로
미 일리노이대에서 ‘뛰는 4족 보행로봇’ 등을 개발한 박해원 교수가 낙점됐다.
오 교수는 내년부터 프로젝트 관리와 후학 지원에 주력할 예정이다.
조백규 국민대 교수, 김정엽 서울과기대 교수,
박일우 광운대 교수 등이 오 교수가 키운 ‘로봇 박사’들이다.
검색 프로그램·외골격 슈트도 로봇?
'로봇의 경계' 어디까지
“나는 로봇이 아닙니다(I’m not a robot).”
지난해까지 구글의 서비스를 이용하려면 반드시 체크해야 했던 문구다.
검색 프로그램·외골격 슈트도 로봇?
'로봇의 경계' 어디까지
“나는 로봇이 아닙니다(I’m not a robot).”
지난해까지 구글의 서비스를 이용하려면 반드시 체크해야 했던 문구다.
서비스에 접근한 사용자가 실제 사람인지,
자동 가입 프로그램인지 구분하기 위해 이런 항목을 만들었다는 게 구글의 설명이다.
로봇이 우리에게 익숙한 휴머노이드 로봇만 의미하는 건 아니라는 사실을 보여주는 대목이기도 하다.
로봇의 어원은 노동을 의미하는 체코어 ‘robota’다.
로봇의 어원은 노동을 의미하는 체코어 ‘robota’다.
체코의 극작가 카렐 차페크가 1920년 쓴 희곡 ‘로섬의 만능로봇’ 덕에 이 용어가 널리 알려졌다.
로봇이 노동을 하며 지능을 얻고 결국 자신들의 창조주인 인간을 살해하게 된다는 게 희곡의 줄거리다.
차페크의 로봇은 물리적 실체를 지닌 인공지능(AI)에 가깝다.
차페크의 로봇은 물리적 실체를 지닌 인공지능(AI)에 가깝다.
하지만 현실 속 로봇은 의미의 범위가 훨씬 넓다.
프로그래밍된 대로만 움직이는 산업용 기계 팔,
입을 수 있는 외골격(外骨格) 형태의 장비 등도 모두 로봇으로 불린다.
기계와 로봇의 경계가 불분명하다는 지적이 끊이지 않는 이유다.
컴퓨터 프로그램에도 로봇이란 용어가 붙는다.
컴퓨터 프로그램에도 로봇이란 용어가 붙는다.
AI를 기반으로 한 메신저 프로그램 ‘채팅로봇’이 대표적인 사례다.
인식과 행위가 합해졌다는 이유로 ‘로봇’이 붙었다는 설명이다.
전문가들은 ‘지능형 로봇’ ‘산업용 로봇’처럼 수식어를 달아 로봇을 구분한다.
주변의 환경을 사람처럼 인식한 뒤 동작을 결정할 수 있어야 지능형 로봇으로 분류된다.
일부 산업용 로봇은 사람을 돕는다는 의미에서 ‘협동 로봇’으로 불린다.
‘서비스 로봇’처럼 용도를 기준으로 로봇을 나눌 때도 있다.
대전=이해성/송형석 기자 ihs@hankyung.com
대전=이해성/송형석 기자 ihs@hankyung.com
'과학' 카테고리의 다른 글
| 美국방부, 군 훈련 중 'UFO 조우' 상원에 기밀 브리핑 (0) | 2019.06.21 |
|---|---|
| 日 사법시험 AI가 뚫었다.."韓 대입시험도 자신" (0) | 2019.05.25 |
| 북, "지능형손전화기 '푸른하늘' 호평" (0) | 2019.05.02 |
| 교통사고로 27년간 혼수상태 어머니, 깨어난 뒤 첫 마디 (0) | 2019.04.24 |
| 최신형스마트폰 '평양 2425', 얼굴인식기능과 무선충전기능 추가 (0) | 2019.04.22 |